
|
Detailed Description
System related APIs and services:
- Initialization.
- Locks.
- Interrupt Handling.
- Power Management.
- Abnormal Termination.
- Realtime counter.
Macros | |
| #define | chSysGetRealtimeCounterX() (rtcnt_t)port_rt_get_counter_value() |
| Returns the current value of the system real time counter. More... | |
| #define | chSysSwitch(ntp, otp) |
| Performs a context switch. More... | |
Masks of executable integrity checks. | |
| #define | CH_INTEGRITY_RLIST 1U |
| #define | CH_INTEGRITY_VTLIST 2U |
| #define | CH_INTEGRITY_REGISTRY 4U |
| #define | CH_INTEGRITY_PORT 8U |
ISRs abstraction macros | |
| #define | CH_IRQ_IS_VALID_PRIORITY(prio) PORT_IRQ_IS_VALID_PRIORITY(prio) |
| Priority level validation macro. More... | |
| #define | CH_IRQ_IS_VALID_KERNEL_PRIORITY(prio) PORT_IRQ_IS_VALID_KERNEL_PRIORITY(prio) |
| Priority level validation macro. More... | |
| #define | CH_IRQ_PROLOGUE() |
| IRQ handler enter code. More... | |
| #define | CH_IRQ_EPILOGUE() |
| IRQ handler exit code. More... | |
| #define | CH_IRQ_HANDLER(id) PORT_IRQ_HANDLER(id) |
| Standard normal IRQ handler declaration. More... | |
Fast ISRs abstraction macros | |
| #define | CH_FAST_IRQ_HANDLER(id) PORT_FAST_IRQ_HANDLER(id) |
| Standard fast IRQ handler declaration. More... | |
Time conversion utilities for the realtime counter | |
| #define | S2RTC(freq, sec) ((freq) * (sec)) |
| Seconds to realtime counter. More... | |
| #define | MS2RTC(freq, msec) (rtcnt_t)((((freq) + 999UL) / 1000UL) * (msec)) |
| Milliseconds to realtime counter. More... | |
| #define | US2RTC(freq, usec) (rtcnt_t)((((freq) + 999999UL) / 1000000UL) * (usec)) |
| Microseconds to realtime counter. More... | |
| #define | RTC2S(freq, n) ((((n) - 1UL) / (freq)) + 1UL) |
| Realtime counter cycles to seconds. More... | |
| #define | RTC2MS(freq, n) ((((n) - 1UL) / ((freq) / 1000UL)) + 1UL) |
| Realtime counter cycles to milliseconds. More... | |
| #define | RTC2US(freq, n) ((((n) - 1UL) / ((freq) / 1000000UL)) + 1UL) |
| Realtime counter cycles to microseconds. More... | |
Functions | |
| THD_WORKING_AREA (ch_idle_thread_wa, PORT_IDLE_THREAD_STACK_SIZE) | |
| Idle thread working area. More... | |
| static void | _idle_thread (void *p) |
| This function implements the idle thread infinite loop. More... | |
| void | chSysInit (void) |
| ChibiOS/RT initialization. More... | |
| void | chSysHalt (const char *reason) |
| Halts the system. More... | |
| bool | chSysIntegrityCheckI (unsigned testmask) |
| System integrity check. More... | |
| void | chSysTimerHandlerI (void) |
| Handles time ticks for round robin preemption and timer increments. More... | |
| syssts_t | chSysGetStatusAndLockX (void) |
| Returns the execution status and enters a critical zone. More... | |
| void | chSysRestoreStatusX (syssts_t sts) |
| Restores the specified execution status and leaves a critical zone. More... | |
| bool | chSysIsCounterWithinX (rtcnt_t cnt, rtcnt_t start, rtcnt_t end) |
| Realtime window test. More... | |
| void | chSysPolledDelayX (rtcnt_t cycles) |
| Polled delay. More... | |
| static void | chSysDisable (void) |
| Raises the system interrupt priority mask to the maximum level. More... | |
| static void | chSysSuspend (void) |
| Raises the system interrupt priority mask to system level. More... | |
| static void | chSysEnable (void) |
| Lowers the system interrupt priority mask to user level. More... | |
| static void | chSysLock (void) |
| Enters the kernel lock state. More... | |
| static void | chSysUnlock (void) |
| Leaves the kernel lock state. More... | |
| static void | chSysLockFromISR (void) |
| Enters the kernel lock state from within an interrupt handler. More... | |
| static void | chSysUnlockFromISR (void) |
| Leaves the kernel lock state from within an interrupt handler. More... | |
| static void | chSysUnconditionalLock (void) |
| Unconditionally enters the kernel lock state. More... | |
| static void | chSysUnconditionalUnlock (void) |
| Unconditionally leaves the kernel lock state. More... | |
| static thread_t * | chSysGetIdleThreadX (void) |
| Returns a pointer to the idle thread. More... | |
Macro Definition Documentation
| #define CH_IRQ_IS_VALID_PRIORITY | ( | prio | ) | PORT_IRQ_IS_VALID_PRIORITY(prio) |
Priority level validation macro.
This macro determines if the passed value is a valid priority level for the underlying architecture.
- Parameters
-
[in] prio the priority level
- Returns
- Priority range result.
- Return values
-
false if the priority is invalid or if the architecture does not support priorities. true if the priority is valid.
| #define CH_IRQ_IS_VALID_KERNEL_PRIORITY | ( | prio | ) | PORT_IRQ_IS_VALID_KERNEL_PRIORITY(prio) |
Priority level validation macro.
This macro determines if the passed value is a valid priority level that cannot preempt the kernel critical zone.
- Parameters
-
[in] prio the priority level
- Returns
- Priority range result.
- Return values
-
false if the priority is invalid or if the architecture does not support priorities. true if the priority is valid.
| #define CH_IRQ_PROLOGUE | ( | ) |
IRQ handler enter code.
- Note
- Usually IRQ handlers functions are also declared naked.
- On some architectures this macro can be empty.
- Function Class:
- Special function, this function has special requirements see the notes.
| #define CH_IRQ_EPILOGUE | ( | ) |
IRQ handler exit code.
- Note
- Usually IRQ handlers function are also declared naked.
-
This macro usually performs the final reschedule by using
chSchIsPreemptionRequired()andchSchDoReschedule().
- Function Class:
- Special function, this function has special requirements see the notes.
| #define CH_IRQ_HANDLER | ( | id | ) | PORT_IRQ_HANDLER(id) |
| #define CH_FAST_IRQ_HANDLER | ( | id | ) | PORT_FAST_IRQ_HANDLER(id) |
| #define S2RTC | ( | freq, | |
| sec | |||
| ) | ((freq) * (sec)) |
Seconds to realtime counter.
Converts from seconds to realtime counter cycles.
- Note
- The macro assumes that
freq>=1.
- Parameters
-
[in] freq clock frequency, in Hz, of the realtime counter [in] sec number of seconds
- Returns
- The number of cycles.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define MS2RTC | ( | freq, | |
| msec | |||
| ) | (rtcnt_t)((((freq) + 999UL) / 1000UL) * (msec)) |
Milliseconds to realtime counter.
Converts from milliseconds to realtime counter cycles.
- Note
- The result is rounded upward to the next millisecond boundary.
-
The macro assumes that
freq>=1000.
- Parameters
-
[in] freq clock frequency, in Hz, of the realtime counter [in] msec number of milliseconds
- Returns
- The number of cycles.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define US2RTC | ( | freq, | |
| usec | |||
| ) | (rtcnt_t)((((freq) + 999999UL) / 1000000UL) * (usec)) |
Microseconds to realtime counter.
Converts from microseconds to realtime counter cycles.
- Note
- The result is rounded upward to the next microsecond boundary.
-
The macro assumes that
freq>=1000000.
- Parameters
-
[in] freq clock frequency, in Hz, of the realtime counter [in] usec number of microseconds
- Returns
- The number of cycles.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define RTC2S | ( | freq, | |
| n | |||
| ) | ((((n) - 1UL) / (freq)) + 1UL) |
Realtime counter cycles to seconds.
Converts from realtime counter cycles number to seconds.
- Note
- The result is rounded up to the next second boundary.
-
The macro assumes that
freq>=1.
- Parameters
-
[in] freq clock frequency, in Hz, of the realtime counter [in] n number of cycles
- Returns
- The number of seconds.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define RTC2MS | ( | freq, | |
| n | |||
| ) | ((((n) - 1UL) / ((freq) / 1000UL)) + 1UL) |
Realtime counter cycles to milliseconds.
Converts from realtime counter cycles number to milliseconds.
- Note
- The result is rounded up to the next millisecond boundary.
-
The macro assumes that
freq>=1000.
- Parameters
-
[in] freq clock frequency, in Hz, of the realtime counter [in] n number of cycles
- Returns
- The number of milliseconds.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define RTC2US | ( | freq, | |
| n | |||
| ) | ((((n) - 1UL) / ((freq) / 1000000UL)) + 1UL) |
Realtime counter cycles to microseconds.
Converts from realtime counter cycles number to microseconds.
- Note
- The result is rounded up to the next microsecond boundary.
-
The macro assumes that
freq>=1000000.
- Parameters
-
[in] freq clock frequency, in Hz, of the realtime counter [in] n number of cycles
- Returns
- The number of microseconds.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define chSysGetRealtimeCounterX | ( | ) | (rtcnt_t)port_rt_get_counter_value() |
Returns the current value of the system real time counter.
- Note
- This function is only available if the port layer supports the option
PORT_SUPPORTS_RT.
- Returns
- The value of the system realtime counter of type rtcnt_t.
- Function Class:
- This is an X-Class API, this function can be invoked from any context.
Definition at line 253 of file chsys.h.
Referenced by chSysPolledDelayX(), chTMChainMeasurementToX(), chTMStartMeasurementX(), chTMStopMeasurementX(), and trace_next().
| #define chSysSwitch | ( | ntp, | |
| otp | |||
| ) |
Performs a context switch.
- Note
- Not a user function, it is meant to be invoked by the scheduler itself or from within the port layer.
- Parameters
-
[in] ntp the thread to be switched in [in] otp the thread to be switched out
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 266 of file chsys.h.
Referenced by chSchDoReschedule(), chSchDoRescheduleAhead(), chSchDoRescheduleBehind(), chSchGoSleepS(), and chSchWakeupS().
Function Documentation
| THD_WORKING_AREA | ( | ch_idle_thread_wa | , |
| PORT_IDLE_THREAD_STACK_SIZE | |||
| ) |
Idle thread working area.
|
static |
This function implements the idle thread infinite loop.
The function puts the processor in the lowest power mode capable to serve interrupts.
The priority is internally set to the minimum system value so that this thread is executed only if there are no other ready threads in the system.
- Parameters
-
[in] p the thread parameter, unused in this scenario
Definition at line 72 of file chsys.c.
References CH_CFG_IDLE_LOOP_HOOK.
Referenced by chSysInit().
| void chSysInit | ( | void | ) |
ChibiOS/RT initialization.
After executing this function the current instructions stream becomes the main thread.
- Precondition
- Interrupts must disabled before invoking this function.
- Postcondition
- The main thread is created with priority
NORMALPRIOand interrupts are enabled.
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 100 of file chsys.c.
References _core_init(), _factory_init(), _heap_init(), _idle_thread(), _scheduler_init(), _stats_init(), _thread_init(), _tm_init(), _trace_init(), _vt_init(), ch, CH_CFG_SYSTEM_INIT_HOOK, CH_STATE_CURRENT, chSysEnable(), chThdCreate(), chTMStartMeasurementX(), currp, ch_system::dbg, IDLEPRIO, ch_system_debug::isr_cnt, ch_system_debug::lock_cnt, ch_system::mainthread, NORMALPRIO, THD_WORKING_AREA_BASE, and THD_WORKING_AREA_END.

| void chSysHalt | ( | const char * | reason | ) |
Halts the system.
This function is invoked by the operating system when an unrecoverable error is detected, for example because a programming error in the application code that triggers an assertion while in debug mode.
- Note
- Can be invoked from any system state.
- Parameters
-
[in] reason pointer to an error string
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 198 of file chsys.c.
References _trace_halt(), ch, CH_CFG_SYSTEM_HALT_HOOK, ch_system::dbg, and ch_system_debug::panic_msg.
Referenced by _dbg_check_disable(), _dbg_check_enable(), _dbg_check_enter_isr(), _dbg_check_leave_isr(), _dbg_check_lock(), _dbg_check_lock_from_isr(), _dbg_check_suspend(), _dbg_check_unlock(), _dbg_check_unlock_from_isr(), chDbgCheckClassI(), and chDbgCheckClassS().

| bool chSysIntegrityCheckI | ( | unsigned | testmask | ) |
System integrity check.
Performs an integrity check of the important ChibiOS/RT data structures.
- Note
- The appropriate action in case of failure is to halt the system before releasing the critical zone.
-
If the system is corrupted then one possible outcome of this function is an exception caused by
NULLor corrupted pointers in list elements. Exception vectors must be monitored as well. - This function is not used internally, it is up to the application to define if and where to perform system checking.
- Performing all tests at once can be a slow operation and can degrade the system response time. It is suggested to execute one test at time and release the critical zone in between tests.
- Parameters
-
[in] testmask Each bit in this mask is associated to a test to be performed.
- Returns
- The test result.
- Return values
-
false The test succeeded. true Test failed.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 240 of file chsys.c.
References ch, chDbgCheckClassI(), ch_thread::newer, ch_threads_queue::next, ch_virtual_timer::next, ch_virtual_timers_list::next, ch_thread::older, ch_threads_queue::prev, ch_virtual_timer::prev, ch_virtual_timers_list::prev, ch_thread::queue, ch_system::rlist, and ch_system::vtlist.

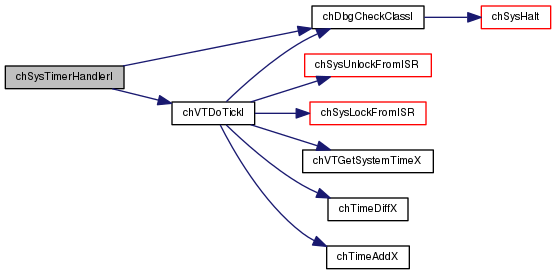
| void chSysTimerHandlerI | ( | void | ) |
Handles time ticks for round robin preemption and timer increments.
Decrements the remaining time quantum of the running thread and preempts it when the quantum is used up. Increments system time and manages the timers.
- Note
- The frequency of the timer determines the system tick granularity and, together with the
CH_CFG_TIME_QUANTUMmacro, the round robin interval.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 341 of file chsys.c.
References CH_CFG_SYSTEM_TICK_HOOK, chDbgCheckClassI(), chVTDoTickI(), and currp.
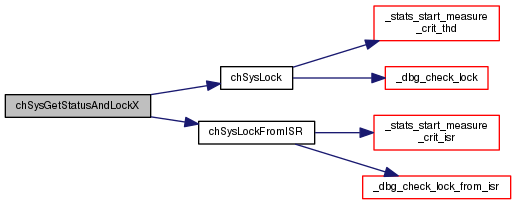
| syssts_t chSysGetStatusAndLockX | ( | void | ) |
Returns the execution status and enters a critical zone.
This functions enters into a critical zone and can be called from any context. Because its flexibility it is less efficient than chSysLock() which is preferable when the calling context is known.
- Postcondition
- The system is in a critical zone.
- Returns
- The previous system status, the encoding of this status word is architecture-dependent and opaque.
- Function Class:
- This is an X-Class API, this function can be invoked from any context.
Definition at line 372 of file chsys.c.
References chSysLock(), and chSysLockFromISR().
| void chSysRestoreStatusX | ( | syssts_t | sts | ) |
Restores the specified execution status and leaves a critical zone.
- Note
- A call to
chSchRescheduleS()is automatically performed if exiting the critical zone and if not in ISR context.
- Parameters
-
[in] sts the system status to be restored.
- Function Class:
- This is an X-Class API, this function can be invoked from any context.
Definition at line 395 of file chsys.c.
References chSchRescheduleS(), chSysUnlock(), and chSysUnlockFromISR().

| bool chSysIsCounterWithinX | ( | rtcnt_t | cnt, |
| rtcnt_t | start, | ||
| rtcnt_t | end | ||
| ) |
Realtime window test.
This function verifies if the current realtime counter value lies within the specified range or not. The test takes care of the realtime counter wrapping to zero on overflow.
- Note
- When start==end then the function returns always true because the whole time range is specified.
-
This function is only available if the port layer supports the option
PORT_SUPPORTS_RT.
- Parameters
-
[in] cnt the counter value to be tested [in] start the start of the time window (inclusive) [in] end the end of the time window (non inclusive)
- Return values
-
true current time within the specified time window. false current time not within the specified time window.
- Function Class:
- This is an X-Class API, this function can be invoked from any context.
Definition at line 427 of file chsys.c.
Referenced by chSysPolledDelayX().
| void chSysPolledDelayX | ( | rtcnt_t | cycles | ) |
Polled delay.
- Note
- The real delay is always few cycles in excess of the specified value.
-
This function is only available if the port layer supports the option
PORT_SUPPORTS_RT.
- Parameters
-
[in] cycles number of cycles
- Function Class:
- This is an X-Class API, this function can be invoked from any context.
Definition at line 443 of file chsys.c.
References chSysGetRealtimeCounterX, and chSysIsCounterWithinX().

|
inlinestatic |
Raises the system interrupt priority mask to the maximum level.
All the maskable interrupt sources are disabled regardless their hardware priority.
- Note
- Do not invoke this API from within a kernel lock.
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 310 of file chsys.h.
References _dbg_check_disable().

|
inlinestatic |
Raises the system interrupt priority mask to system level.
The interrupt sources that should not be able to preempt the kernel are disabled, interrupt sources with higher priority are still enabled.
- Note
- Do not invoke this API from within a kernel lock.
-
This API is no replacement for
chSysLock(), thechSysLock()could do more than just disable the interrupts.
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 327 of file chsys.h.
References _dbg_check_suspend().

|
inlinestatic |
Lowers the system interrupt priority mask to user level.
All the interrupt sources are enabled.
- Note
- Do not invoke this API from within a kernel lock.
-
This API is no replacement for
chSysUnlock(), thechSysUnlock()could do more than just enable the interrupts.
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 342 of file chsys.h.
References _dbg_check_enable().
Referenced by chSysInit().

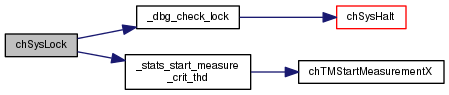
|
inlinestatic |
Enters the kernel lock state.
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 353 of file chsys.h.
References _dbg_check_lock(), and _stats_start_measure_crit_thd().
Referenced by chBSemSignal(), chCondBroadcast(), chCondSignal(), chCondWait(), chCondWaitTimeout(), chCoreAllocAligned(), chCoreAllocAlignedWithOffset(), chDbgResumeTrace(), chDbgSuspendTrace(), chDbgWriteTrace(), chEvtAddEvents(), chEvtBroadcastFlags(), chEvtGetAndClearEvents(), chEvtGetAndClearFlags(), chEvtRegisterMaskWithFlags(), chEvtSignal(), chEvtUnregister(), chEvtWaitAll(), chEvtWaitAllTimeout(), chEvtWaitAny(), chEvtWaitAnyTimeout(), chEvtWaitOne(), chEvtWaitOneTimeout(), chGuardedPoolAllocTimeout(), chGuardedPoolFree(), chMBFetchTimeout(), chMBPostAheadTimeout(), chMBPostTimeout(), chMBReset(), chMsgRelease(), chMsgSend(), chMsgWait(), chMtxLock(), chMtxTryLock(), chMtxUnlock(), chMtxUnlockAll(), chPipeReadTimeout(), chPipeReset(), chPipeWriteTimeout(), chPoolAlloc(), chPoolFree(), chRegFirstThread(), chRegNextThread(), chSemReset(), chSemSignal(), chSemSignalWait(), chSemWait(), chSemWaitTimeout(), chSysGetStatusAndLockX(), chSysUnconditionalLock(), chThdAddRef(), chThdCreate(), chThdCreateFromHeap(), chThdCreateFromMemoryPool(), chThdCreateStatic(), chThdCreateSuspended(), chThdExit(), chThdRelease(), chThdResume(), chThdSetPriority(), chThdSleep(), chThdSleepUntil(), chThdSleepUntilWindowed(), chThdStart(), chThdTerminate(), chThdWait(), chThdYield(), chVTGetSystemTime(), chVTIsArmed(), chVTReset(), and chVTSet().
|
inlinestatic |
Leaves the kernel lock state.
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 365 of file chsys.h.
References _dbg_check_unlock(), _stats_stop_measure_crit_thd(), ch, chDbgAssert, and ch_system::rlist.
Referenced by chBSemSignal(), chCondBroadcast(), chCondSignal(), chCondWait(), chCondWaitTimeout(), chCoreAllocAligned(), chCoreAllocAlignedWithOffset(), chDbgResumeTrace(), chDbgSuspendTrace(), chDbgWriteTrace(), chEvtAddEvents(), chEvtBroadcastFlags(), chEvtGetAndClearEvents(), chEvtGetAndClearFlags(), chEvtRegisterMaskWithFlags(), chEvtSignal(), chEvtUnregister(), chEvtWaitAll(), chEvtWaitAllTimeout(), chEvtWaitAny(), chEvtWaitAnyTimeout(), chEvtWaitOne(), chEvtWaitOneTimeout(), chGuardedPoolAllocTimeout(), chGuardedPoolFree(), chMBFetchTimeout(), chMBPostAheadTimeout(), chMBPostTimeout(), chMBReset(), chMsgRelease(), chMsgSend(), chMsgWait(), chMtxLock(), chMtxTryLock(), chMtxUnlock(), chMtxUnlockAll(), chPipeReadTimeout(), chPipeReset(), chPipeWriteTimeout(), chPoolAlloc(), chPoolFree(), chRegFirstThread(), chRegNextThread(), chSemReset(), chSemSignal(), chSemSignalWait(), chSemWait(), chSemWaitTimeout(), chSysRestoreStatusX(), chSysUnconditionalUnlock(), chThdAddRef(), chThdCreate(), chThdCreateFromHeap(), chThdCreateFromMemoryPool(), chThdCreateStatic(), chThdCreateSuspended(), chThdRelease(), chThdResume(), chThdSetPriority(), chThdSleep(), chThdSleepUntil(), chThdSleepUntilWindowed(), chThdStart(), chThdTerminate(), chThdWait(), chThdYield(), chVTGetSystemTime(), chVTIsArmed(), chVTReset(), and chVTSet().

|
inlinestatic |
Enters the kernel lock state from within an interrupt handler.
- Note
- This API may do nothing on some architectures, it is required because on ports that support preemptable interrupt handlers it is required to raise the interrupt mask to the same level of the system mutual exclusion zone.
It is good practice to invoke this API before invoking any I-class syscall from an interrupt handler. - This API must be invoked exclusively from interrupt handlers.
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 393 of file chsys.h.
References _dbg_check_lock_from_isr(), and _stats_start_measure_crit_isr().
Referenced by chSchGoSleepS(), chSysGetStatusAndLockX(), and chVTDoTickI().

|
inlinestatic |
Leaves the kernel lock state from within an interrupt handler.
- Note
- This API may do nothing on some architectures, it is required because on ports that support preemptable interrupt handlers it is required to raise the interrupt mask to the same level of the system mutual exclusion zone.
It is good practice to invoke this API after invoking any I-class syscall from an interrupt handler. - This API must be invoked exclusively from interrupt handlers.
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 413 of file chsys.h.
References _dbg_check_unlock_from_isr(), and _stats_stop_measure_crit_isr().
Referenced by chSchGoSleepS(), chSysRestoreStatusX(), and chVTDoTickI().

|
inlinestatic |
Unconditionally enters the kernel lock state.
- Note
- Can be called without previous knowledge of the current lock state. The final state is "s-locked".
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 427 of file chsys.h.
References chSysLock().

|
inlinestatic |
Unconditionally leaves the kernel lock state.
- Note
- Can be called without previous knowledge of the current lock state. The final state is "normal".
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 441 of file chsys.h.
References chSysUnlock().

|
inlinestatic |
Returns a pointer to the idle thread.
- Precondition
- In order to use this function the option
CH_CFG_NO_IDLE_THREADmust be disabled.
- Note
- The reference counter of the idle thread is not incremented but it is not strictly required being the idle thread a static object.
- Returns
- Pointer to the idle thread.
- Function Class:
- This is an X-Class API, this function can be invoked from any context.
Definition at line 461 of file chsys.h.
References ch, and ch_system::rlist.
