Generic ICU Driver. More...

|
Detailed Description
Generic ICU Driver.
This module implements a generic ICU (Input Capture Unit) driver. The purpose of the driver is to measure period and duty cycle of an input digital signal (PWM input).
- Precondition
- In order to use the ICU driver the
HAL_USE_ICUoption must be enabled inhalconf.h.
Driver State Machine
The driver implements a state machine internally, not all the driver functionalities can be used in any moment, any transition not explicitly shown in the following diagram has to be considered an error and shall be captured by an assertion (if enabled).
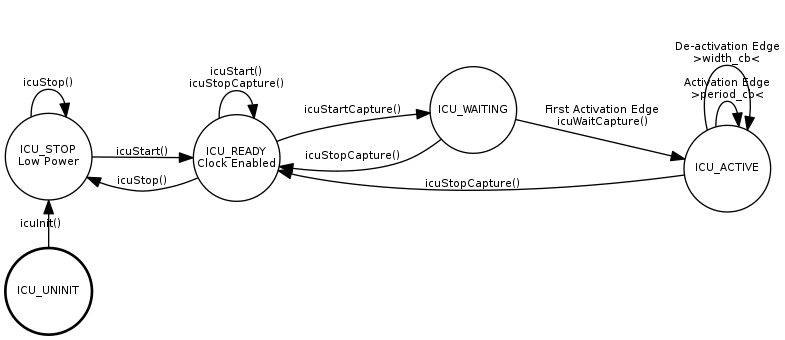
ICU Operations.
This driver abstracts a generic Input Capture Unit composed of:
- A clock prescaler.
- A main up counter.
- Two capture registers triggered by the rising and falling edges on the sampled input.
The ICU unit can be programmed to synchronize on the rising or falling edge of the sample input:
- ICU_INPUT_ACTIVE_HIGH, a rising edge is the start signal.
- ICU_INPUT_ACTIVE_LOW, a falling edge is the start signal.
Callbacks are optionally invoked when:
- On the PWM de-activation edge.
- On the PWM activation edge, measurements for the previous cycle are available from this callback and can be retrieved using
icuGetPeriodX()andicuGetWidthX().
Macros | |
| #define | icu_lld_get_width(icup) 0 |
| Returns the width of the latest pulse. More... | |
| #define | icu_lld_get_period(icup) 0 |
| Returns the width of the latest cycle. More... | |
| #define | icu_lld_are_notifications_enabled(icup) false |
| Check on notifications status. More... | |
Macro Functions | |
| #define | icuStartCaptureI(icup) |
| Starts the input capture. More... | |
| #define | icuStopCaptureI(icup) |
| Stops the input capture. More... | |
| #define | icuEnableNotificationsI(icup) icu_lld_enable_notifications(icup) |
| Enables notifications. More... | |
| #define | icuDisableNotificationsI(icup) icu_lld_disable_notifications(icup) |
| Disables notifications. More... | |
| #define | icuAreNotificationsEnabledX(icup) icu_lld_are_notifications_enabled(icup) |
| Check on notifications status. More... | |
| #define | icuGetWidthX(icup) icu_lld_get_width(icup) |
| Returns the width of the latest pulse. More... | |
| #define | icuGetPeriodX(icup) icu_lld_get_period(icup) |
| Returns the width of the latest cycle. More... | |
Low level driver helper macros | |
| #define | _icu_isr_invoke_width_cb(icup) |
| Common ISR code, ICU width event. More... | |
| #define | _icu_isr_invoke_period_cb(icup) |
| Common ISR code, ICU period event. More... | |
| #define | _icu_isr_invoke_overflow_cb(icup) |
| Common ISR code, ICU timer overflow event. More... | |
PLATFORM configuration options | |
| #define | PLATFORM_ICU_USE_ICU1 FALSE |
| ICUD1 driver enable switch. More... | |
Typedefs | |
| typedef struct ICUDriver | ICUDriver |
| Type of a structure representing an ICU driver. More... | |
| typedef void(* | icucallback_t) (ICUDriver *icup) |
| ICU notification callback type. More... | |
| typedef uint32_t | icufreq_t |
| ICU frequency type. More... | |
| typedef uint32_t | icucnt_t |
| ICU counter type. More... | |
Data Structures | |
| struct | ICUConfig |
| Driver configuration structure. More... | |
| struct | ICUDriver |
| Structure representing an ICU driver. More... | |
Functions | |
| void | icuInit (void) |
| ICU Driver initialization. More... | |
| void | icuObjectInit (ICUDriver *icup) |
Initializes the standard part of a ICUDriver structure. More... | |
| void | icuStart (ICUDriver *icup, const ICUConfig *config) |
| Configures and activates the ICU peripheral. More... | |
| void | icuStop (ICUDriver *icup) |
| Deactivates the ICU peripheral. More... | |
| void | icuStartCapture (ICUDriver *icup) |
| Starts the input capture. More... | |
| bool | icuWaitCapture (ICUDriver *icup) |
| Waits for a completed capture. More... | |
| void | icuStopCapture (ICUDriver *icup) |
| Stops the input capture. More... | |
| void | icuEnableNotifications (ICUDriver *icup) |
| Enables notifications. More... | |
| void | icuDisableNotifications (ICUDriver *icup) |
| Disables notifications. More... | |
| void | icu_lld_init (void) |
| Low level ICU driver initialization. More... | |
| void | icu_lld_start (ICUDriver *icup) |
| Configures and activates the ICU peripheral. More... | |
| void | icu_lld_stop (ICUDriver *icup) |
| Deactivates the ICU peripheral. More... | |
| void | icu_lld_start_capture (ICUDriver *icup) |
| Starts the input capture. More... | |
| bool | icu_lld_wait_capture (ICUDriver *icup) |
| Waits for a completed capture. More... | |
| void | icu_lld_stop_capture (ICUDriver *icup) |
| Stops the input capture. More... | |
| void | icu_lld_enable_notifications (ICUDriver *icup) |
| Enables notifications. More... | |
| void | icu_lld_disable_notifications (ICUDriver *icup) |
| Disables notifications. More... | |
Enumerations |
Variables | |
| ICUDriver | ICUD1 |
| ICUD1 driver identifier. More... | |
Macro Definition Documentation
| #define icuStartCaptureI | ( | icup | ) |
Starts the input capture.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 86 of file hal_icu.h.
Referenced by icuStartCapture().
| #define icuStopCaptureI | ( | icup | ) |
Stops the input capture.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 98 of file hal_icu.h.
Referenced by icuStopCapture().
| #define icuEnableNotificationsI | ( | icup | ) | icu_lld_enable_notifications(icup) |
Enables notifications.
- Precondition
- The ICU unit must have been activated using
icuStart()and the capture started usingicuStartCapture().
- Note
- If the notification is already enabled then the call has no effect.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 113 of file hal_icu.h.
Referenced by icuEnableNotifications().
| #define icuDisableNotificationsI | ( | icup | ) | icu_lld_disable_notifications(icup) |
Disables notifications.
- Precondition
- The ICU unit must have been activated using
icuStart()and the capture started usingicuStartCapture().
- Note
- If the notification is already disabled then the call has no effect.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 125 of file hal_icu.h.
Referenced by icuDisableNotifications().
| #define icuAreNotificationsEnabledX | ( | icup | ) | icu_lld_are_notifications_enabled(icup) |
Check on notifications status.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Returns
- The notifications status.
- Return values
-
false if notifications are not enabled. true if notifications are enabled.
- Function Class:Not an API, this function is for internal use only.
Definition at line 137 of file hal_icu.h.
Referenced by icuWaitCapture().
| #define icuGetWidthX | ( | icup | ) | icu_lld_get_width(icup) |
Returns the width of the latest pulse.
The pulse width is defined as number of ticks between the start edge and the stop edge.
- Note
- This function is meant to be invoked from the width capture callback.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Returns
- The number of ticks.
- Function Class:This is an X-Class API, this function can be invoked from any context.
| #define icuGetPeriodX | ( | icup | ) | icu_lld_get_period(icup) |
Returns the width of the latest cycle.
The cycle width is defined as number of ticks between a start edge and the next start edge.
- Note
- This function is meant to be invoked from the width capture callback.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Returns
- The number of ticks.
- Function Class:This is an X-Class API, this function can be invoked from any context.
| #define _icu_isr_invoke_width_cb | ( | icup | ) |
Common ISR code, ICU width event.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Not an API, this function is for internal use only.
| #define _icu_isr_invoke_period_cb | ( | icup | ) |
Common ISR code, ICU period event.
- Note
- A period event brings the driver into the
ICU_ACTIVEstate.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Not an API, this function is for internal use only.
| #define _icu_isr_invoke_overflow_cb | ( | icup | ) |
Common ISR code, ICU timer overflow event.
- Note
- An overflow always brings the driver back to the
ICU_WAITINGstate.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Not an API, this function is for internal use only.
| #define PLATFORM_ICU_USE_ICU1 FALSE |
ICUD1 driver enable switch.
If set to TRUE the support for ICUD1 is included.
- Note
- The default is
FALSE.
Definition at line 48 of file hal_icu_lld.h.
| #define icu_lld_get_width | ( | icup | ) | 0 |
Returns the width of the latest pulse.
The pulse width is defined as number of ticks between the start edge and the stop edge.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Returns
- The number of ticks.
- Function Class:Not an API, this function is for internal use only.
Definition at line 140 of file hal_icu_lld.h.
| #define icu_lld_get_period | ( | icup | ) | 0 |
Returns the width of the latest cycle.
The cycle width is defined as number of ticks between a start edge and the next start edge.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Returns
- The number of ticks.
- Function Class:Not an API, this function is for internal use only.
Definition at line 152 of file hal_icu_lld.h.
| #define icu_lld_are_notifications_enabled | ( | icup | ) | false |
Check on notifications status.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Returns
- The notifications status.
- Return values
-
false if notifications are not enabled. true if notifications are enabled.
- Function Class:Not an API, this function is for internal use only.
Definition at line 164 of file hal_icu_lld.h.
Typedef Documentation
| typedef void(* icucallback_t) (ICUDriver *icup) |
| typedef uint32_t icufreq_t |
ICU frequency type.
Definition at line 71 of file hal_icu_lld.h.
| typedef uint32_t icucnt_t |
ICU counter type.
Definition at line 76 of file hal_icu_lld.h.
Enumeration Type Documentation
| enum icustate_t |
| enum icumode_t |
ICU driver mode.
| Enumerator | |
|---|---|
| ICU_INPUT_ACTIVE_HIGH |
Trigger on rising edge. |
| ICU_INPUT_ACTIVE_LOW |
Trigger on falling edge. |
Definition at line 63 of file hal_icu_lld.h.
Function Documentation
| void icuInit | ( | void | ) |
ICU Driver initialization.
- Note
- This function is implicitly invoked by
halInit(), there is no need to explicitly initialize the driver.
- Function Class:Initializer, this function just initializes an object and can be invoked before the kernel is initialized.
Definition at line 56 of file hal_icu.c.
References icu_lld_init().
Referenced by halInit().

| void icuObjectInit | ( | ICUDriver * | icup | ) |
Initializes the standard part of a ICUDriver structure.
- Parameters
-
[out] icup pointer to the ICUDriverobject
- Function Class:Initializer, this function just initializes an object and can be invoked before the kernel is initialized.
Definition at line 68 of file hal_icu.c.
References ICUDriver::config, ICU_STOP, and ICUDriver::state.
Referenced by icu_lld_init().
Configures and activates the ICU peripheral.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 82 of file hal_icu.c.
References ICUDriver::config, icu_lld_start(), ICU_READY, ICU_STOP, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and ICUDriver::state.
| void icuStop | ( | ICUDriver * | icup | ) |
Deactivates the ICU peripheral.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 102 of file hal_icu.c.
References ICUDriver::config, icu_lld_stop(), ICU_READY, ICU_STOP, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and ICUDriver::state.
| void icuStartCapture | ( | ICUDriver * | icup | ) |
Starts the input capture.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 125 of file hal_icu.c.
References ICU_READY, icuStartCaptureI, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and ICUDriver::state.
| bool icuWaitCapture | ( | ICUDriver * | icup | ) |
Waits for a completed capture.
- Note
- The operation could be performed in polled mode depending on.
- In order to use this function notifications must be disabled.
- Precondition
- The driver must be in
ICU_WAITINGorICU_ACTIVEstates.
- Postcondition
- After the capture is available the driver is in
ICU_ACTIVEstate. If a capture fails then the driver is inICU_WAITINGstate.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Returns
- The capture status.
- Return values
-
false if the capture is successful. true if a timer overflow occurred.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 151 of file hal_icu.c.
References ICU_ACTIVE, icu_lld_wait_capture(), ICU_WAITING, icuAreNotificationsEnabledX, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and ICUDriver::state.
| void icuStopCapture | ( | ICUDriver * | icup | ) |
Stops the input capture.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 175 of file hal_icu.c.
References ICU_ACTIVE, ICU_READY, ICU_WAITING, icuStopCaptureI, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and ICUDriver::state.
| void icuEnableNotifications | ( | ICUDriver * | icup | ) |
Enables notifications.
- Precondition
- The ICU unit must have been activated using
icuStart()and the capture started usingicuStartCapture().
- Note
- If the notification is already enabled then the call has no effect.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 197 of file hal_icu.c.
References ICU_ACTIVE, ICU_WAITING, icuEnableNotificationsI, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and ICUDriver::state.
| void icuDisableNotifications | ( | ICUDriver * | icup | ) |
Disables notifications.
- Precondition
- The ICU unit must have been activated using
icuStart()and the capture started usingicuStartCapture().
- Note
- If the notification is already disabled then the call has no effect.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 218 of file hal_icu.c.
References ICU_ACTIVE, ICU_WAITING, icuDisableNotificationsI, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and ICUDriver::state.
| void icu_lld_init | ( | void | ) |
Low level ICU driver initialization.
- Function Class:Not an API, this function is for internal use only.
Definition at line 66 of file hal_icu_lld.c.
References icuObjectInit().
Referenced by icuInit().

| void icu_lld_start | ( | ICUDriver * | icup | ) |
Configures and activates the ICU peripheral.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Not an API, this function is for internal use only.
Definition at line 81 of file hal_icu_lld.c.
References ICU_STOP, and ICUDriver::state.
Referenced by icuStart().
| void icu_lld_stop | ( | ICUDriver * | icup | ) |
Deactivates the ICU peripheral.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Not an API, this function is for internal use only.
Definition at line 100 of file hal_icu_lld.c.
References ICU_READY, and ICUDriver::state.
Referenced by icuStop().
| void icu_lld_start_capture | ( | ICUDriver * | icup | ) |
Starts the input capture.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Not an API, this function is for internal use only.
Definition at line 119 of file hal_icu_lld.c.
| bool icu_lld_wait_capture | ( | ICUDriver * | icup | ) |
Waits for a completed capture.
- Note
- The operation is performed in polled mode.
- In order to use this function notifications must be disabled.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Returns
- The capture status.
- Return values
-
false if the capture is successful. true if a timer overflow occurred.
- Function Class:Not an API, this function is for internal use only.
Definition at line 136 of file hal_icu_lld.c.
Referenced by icuWaitCapture().
| void icu_lld_stop_capture | ( | ICUDriver * | icup | ) |
Stops the input capture.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Not an API, this function is for internal use only.
Definition at line 150 of file hal_icu_lld.c.
| void icu_lld_enable_notifications | ( | ICUDriver * | icup | ) |
Enables notifications.
- Precondition
- The ICU unit must have been activated using
icuStart()and the capture started usingicuStartCapture().
- Note
- If the notification is already enabled then the call has no effect.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 165 of file hal_icu_lld.c.
| void icu_lld_disable_notifications | ( | ICUDriver * | icup | ) |
Disables notifications.
- Precondition
- The ICU unit must have been activated using
icuStart()and the capture started usingicuStartCapture().
- Note
- If the notification is already disabled then the call has no effect.
- Parameters
-
[in] icup pointer to the ICUDriverobject
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 180 of file hal_icu_lld.c.
Variable Documentation
| ICUDriver ICUD1 |
ICUD1 driver identifier.
- Note
- The driver ICUD1 allocates the complex timer TIM1 when enabled.
Definition at line 42 of file hal_icu_lld.c.
